

{kind=link}
1. Introduction:
This text primarily introduces the sensible utility of LIMO Cobot by Elephant Robotics in a simulated situation. You might have seen earlier posts about LIMO Cobot’s technical circumstances, A[LINK], B[LINK]. The rationale for writing one other associated article is that the unique testing setting, whereas demonstrating primary performance, typically seems overly idealized and simplified when simulating real-world purposes. Subsequently, we purpose to make use of it in a extra operationally constant setting and share a number of the points that arose at the moment.
2. Evaluating the Previous and New Situations:
First, let’s have a look at what the outdated and new eventualities are like.
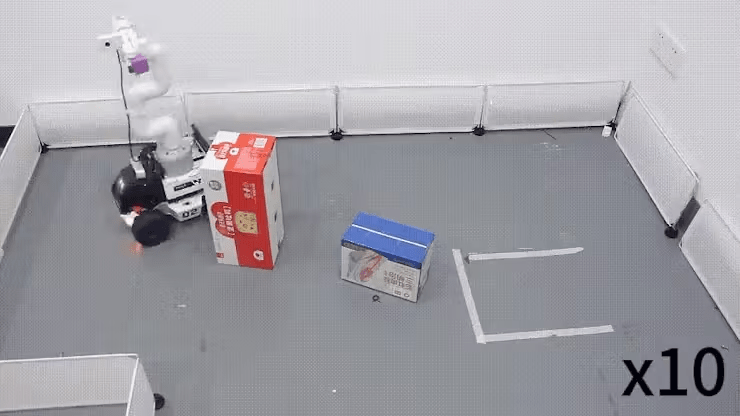
Previous State of affairs: A easy setup with a couple of obstacles, comparatively common objects, and a discipline enclosed by limitations, roughly 1.5m*2m in dimension.
New State of affairs: The brand new situation comprises a greater diversity of obstacles of various shapes, together with a hollowed-out object within the center, simulating an actual setting with highway steering markers, parking areas, and extra. The dimensions of the sector is 3m*3m.
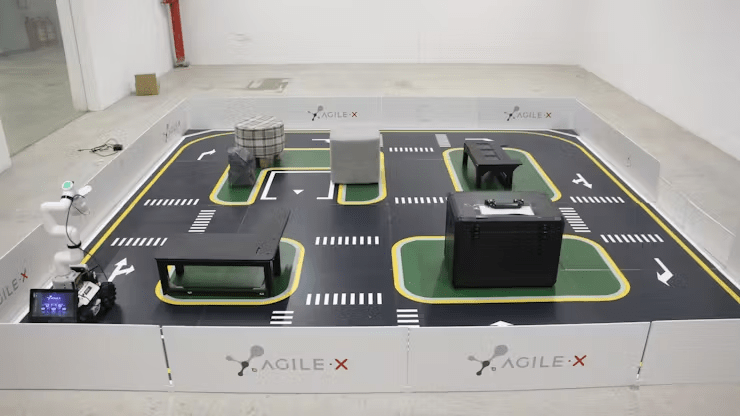
The change in setting is important for testing and demonstrating the comprehensiveness and applicability of our product.
3. Evaluation of Sensible Instances:
Subsequent, let’s briefly introduce the general course of.
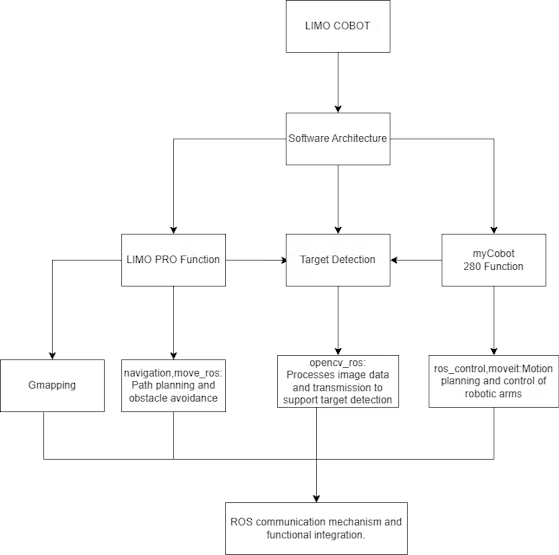
The method is principally divided into three modules: one is the performance of LIMO PRO, the second is machine imaginative and prescient processing, and the third is the performance of the robotic arm. (For a extra detailed introduction, please see the earlier article https://robots-blog.com/2024/05/16/exploring-elephant-robotics-limo-cobot/.)
LIMO PRO is principally chargeable for SLAM mapping, utilizing the gmapping algorithm to map the terrain, navigate, and finally obtain the perform of fixed-point patrol.
myCobot 280 M5 is primarily chargeable for the duty of greedy objects. A digital camera and a suction pump actuator are put in on the finish of the robotic arm. The digital camera captures the actual scene, and the picture is processed by the OpenCV algorithm to search out the coordinates of the goal object and carry out the greedy operation.
Total course of:
1. LIMO performs mapping.⇛
2. Run the fixed-point cruising program.⇛
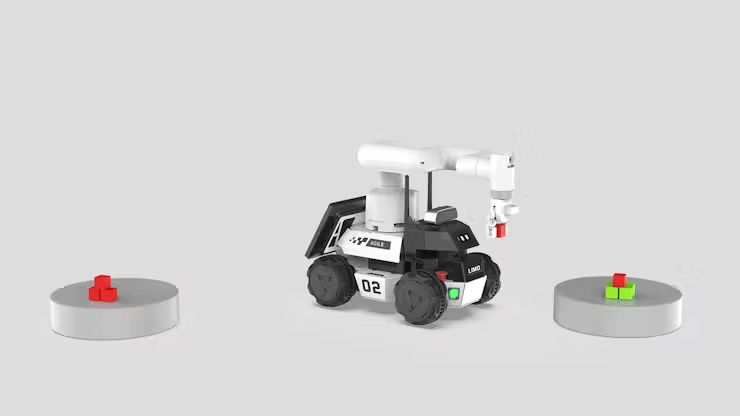
3. LIMO goes to level A ⇛ myCobot 280 performs the greedy operation ⇒ goes to level B ⇛ myCobot 280 performs the inserting operation.
4. ↺ Repeat step 3 till there are not any goal objects, then terminate this system.
Subsequent, let’s observe the sensible execution course of.
Mapping:
First, it’s worthwhile to begin the radar by opening a brand new terminal and getting into the next command:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=falseThen, begin the gmapping mapping algorithm by opening one other new terminal and getting into the command:
roslaunch limo_bringup limo_gmapping.launchAfter profitable startup, the rviz visualization software will open, and you will notice the interface as proven within the determine.
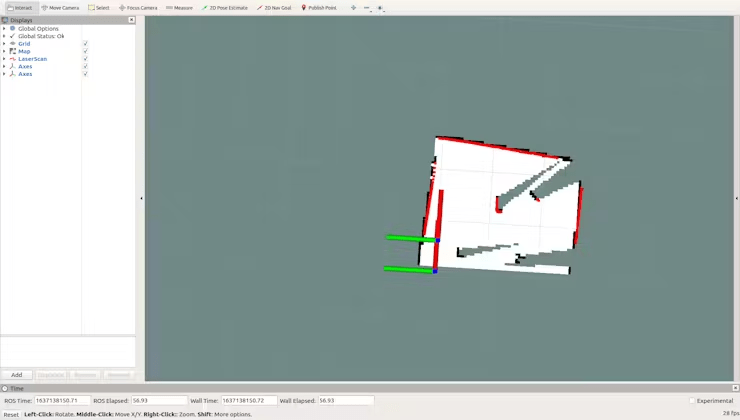
At this level, you possibly can change the controller to distant management mode to manage the LIMO for mapping.
After establishing the map, it’s worthwhile to run the next instructions to save lots of the map to a specified listing:
1. Change to the listing the place you wish to save the map. Right here, save the map to `~/agilex_ws/src/limo_ros/limo_bringup/maps/`. Enter the command within the terminal:
cd ~/agilex_ws/src/limo_ros/limo_bringup/maps/2. After switching to `/agilex_ws/limo_bringup/maps`, proceed to enter the command within the terminal:
rosrun map_server map_saver -f map1
This course of went very easily. Let’s proceed by testing the navigation perform from level A to level B.
Navigation:
1. First, begin the radar by getting into the next command within the terminal:
roslaunch limo_bringup limo_start.launch pub_odom_tf:=false2. Begin the navigation perform by getting into the next command within the terminal:
roslaunch limo_bringup limo_navigation_diff.launchUpon success, this interface will open, displaying the map we simply created.
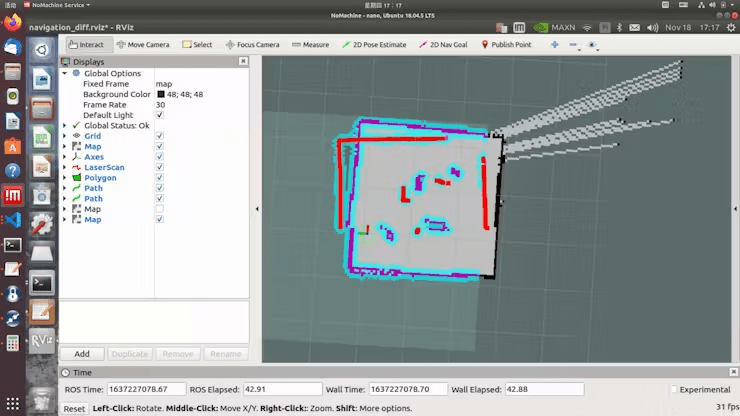
Click on on „2D Pose Estimate, “ then click on on the placement the place LIMO is on the map. After beginning navigation, one can find that the form scanned by the laser doesn’t overlap with the map. It’s worthwhile to manually appropriate this by adjusting the precise place of the chassis within the scene on the map displayed in rviz. Use the instruments in rviz to publish an approximate place for LIMO. Then, use the controller to rotate LIMO, permitting it to auto-correct. When the form of the laser scan overlaps with the shapes within the map’s scene, the correction is full, as proven within the determine the place the scanned form and the map overlap.

Click on on „2D Nav Objective“ and choose the vacation spot on the map for navigation.
The navigation check additionally proceeds easily.
Subsequent, we are going to transfer on to the half in regards to the static robotic arm’s greedy perform.
Figuring out and Buying the Pose of Aruco Codes
To exactly determine objects and acquire the place of the goal object, we processed Aruco codes. Earlier than beginning, guarantee the particular parameters of the digital camera are set.
Initialize the digital camera parameters primarily based on the digital camera getting used.
def __init__(self, mtx: np.ndarray, dist: np.ndarray, marker_size: int):
self.mtx = mtx
self.dist = dist
self.marker_size = marker_size
self.aruco_dict = cv2.aruco.Dictionary_get(cv2.aruco.DICT_6X6_250)
self.parameters = cv2.aruco.DetectorParameters_create()Then, determine the article and estimate its pose to acquire the 3D place of the article and output the place data.
def estimatePoseSingleMarkers(self, corners):
"""
This may estimate the rvec and tvec for every of the marker corners detected by:
corners, ids, rejectedImgPoints = detector.detectMarkers(picture)
corners - is an array of detected corners for every detected marker within the picture
marker_size - is the dimensions of the detected markers
mtx - is the digital camera matrix
distortion - is the digital camera distortion matrix
RETURN listing of rvecs, tvecs, and trash (in order that it corresponds to the outdated estimatePoseSingleMarkers())
"""
marker_points = np.array([[-self.marker_size / 2, self.marker_size / 2, 0],
[self.marker_size / 2, self.marker_size / 2, 0],
[self.marker_size / 2, -self.marker_size / 2, 0],
[-self.marker_size / 2, -self.marker_size / 2, 0]], dtype=np.float32)
rvecs = []
tvecs = []
for nook in corners:
retval, rvec, tvec = cv2.solvePnP(marker_points, nook, self.mtx, self.dist, False,
cv2.SOLVEPNP_IPPE_SQUARE)
if retval:
rvecs.append(rvec)
tvecs.append(tvec)rvecs = np.array(rvecs)
tvecs = np.array(tvecs)
(rvecs - tvecs).any()
return rvecs, tvecs
The steps above full the identification and acquisition of the article’s data, and at last, the article’s coordinates are returned to the robotic arm to execute the greedy.
Robotic Arm Motion and Greedy Operation
Primarily based on the place of the Aruco marker, calculate the goal coordinates the robotic arm wants to maneuver to and convert the place right into a coordinate system appropriate for the robotic arm.
def homo_transform_matrix(x, y, z, rx, ry, rz, order="ZYX"):
rot_mat = rotation_matrix(rx, ry, rz, order=order)
trans_vec = np.array([[x, y, z, 1]]).T
mat = np.vstack([rot_mat, np.zeros((1, 3))])
mat = np.hstack([mat, trans_vec])
return matIf the Z-axis place is detected as too excessive, will probably be corrected:
if end_effector_z_height isn't None:
p_base[2] = end_effector_z_heightAfter the coordinate correction is accomplished, the robotic arm will transfer to the goal place.
# Concatenate x, y, z, and the present posture into a brand new array
new_coords = np.concatenate([p_base, curr_rotation[3:]])
xy_coords = new_coords.copy()Then, management the tip effector’s API to suction the article.
The above completes the respective capabilities of the 2 robots. Subsequent, they are going to be built-in into the ROS setting.
#Initialize the coordinates of level A and B
goal_1 = [(2.060220241546631,-2.2297520637512207,0.009794792000444471,0.9999520298742676)] #B
goal_2 = [(1.1215190887451172,-0.002757132053375244,-0.7129997613218174,0.7011642748707548)] #A
#Begin navigation and hyperlink the robotic arm
map_navigation = MapNavigation()
arm = VisualGrasping("10.42.0.203",9000)
print("join profitable")
arm.perform_visual_grasp(1,-89)
# Navigate to location A and carry out the duty
for objective in goal_1:
x_goal, y_goal, orientation_z, orientation_w = objective
flag_feed_goalReached = map_navigation.moveToGoal(x_goal, y_goal, orientation_z, orientation_w)
if flag_feed_goalReached:
time.sleep(1)
# executing 1 seize and setting the tip effector's Z-axis peak to -93.
arm.unload()
print("command accomplished")
else:
print("failed")
4. Issues Encountered
Mapping State of affairs:
After we initially tried mapping with out enclosing the sector, frequent errors occurred throughout navigation and localization, and it failed to satisfy our necessities for a simulated situation.
Navigation State of affairs:
Within the new situation, one of many obstacles has a hole construction.

Throughout navigation from level A to level B, LIMO might fail to detect this impediment and assume it may go by way of, damaging the unique impediment. This problem arises as a result of LIMO’s radar is positioned low, scanning solely the empty house. Doable options embody adjusting the radar’s scanning vary, which requires intensive testing for fine-tuning, or adjusting the radar’s peak to make sure the impediment is acknowledged as impassable.
Robotic Arm Greedy State of affairs:
Within the video, it’s evident that our goal object is positioned on a flat floor. The greedy didn’t contemplate impediment avoidance for the article. Sooner or later, when setting particular positions for greedy, this example must be thought-about.
5. Conclusion
Total, LIMO Cobot carried out excellently on this situation, efficiently assembly the necessities. All the simulated situation lined a number of core areas of robotics, together with movement management of the robotic arm, path planning, machine imaginative and prescient recognition and greedy, and radar mapping navigation and fixed-point cruising capabilities of the cell chassis. By integrating these purposeful modules in ROS, we constructed an environment friendly automated course of, showcasing LIMO Cobot’s broad adaptability and superior capabilities in advanced environments.
Credit

Elephant Robotics
Ähnliche Beiträge