

{kind=link}
|
Hearken to this text  |

Indoor cellular robots depend on autonomous navigation for protected and environment friendly supply. Supply: Relay Robotics
Once we consider autonomous navigation, the very first thing that often involves thoughts is self-driving vehicles. Though their improvement has spanned many years, current years have seen important developments.
One vital framework that’s used ubiquitously within the self-driving automobile trade is the classification of ranges of driving automation. Outlined by the Society of Automotive Engineers (SAE) in 2014, this framework stays an ordinary reference within the subject.
Whereas indoor cellular robots have loved nowhere close to the celebrity that self-driving vehicles have, they’ve advanced considerably prior to now decade as effectively. Pushed by workers shortages, service robots are more and more being deployed throughout numerous industries, together with hospitality, healthcare, warehouse and logistics, meals service, and cleansing.
Relay robots particularly, are being deployed in busy hospitals and inns internationally. Nevertheless, not like automated driving, there may be at present no extensively adopted normal for ranges of autonomous navigation for indoor robots. Our goal is to current such a framework.
Given the inherent availability of a human driver as fallback in self-driving vehicles, a lot of the SAE framework is predicated on the distribution of driving duties between the human driver and the self-driving agent. Stage 0 signifies no automation the place the human driver is totally in management.
Ranges 1, 2, and three have various levels of partial automation. At Stage 4, the automobile is totally self-driving, however solely beneath sure outlined circumstances. Main self-driving corporations like Waymo have achieved this stage of autonomy.
Lastly, Stage 5 is full automation in every single place and in all circumstances. This stage has not been achieved but.
What influences ranges of autonomous navigation for indoor robots?
Set up complexity
Indoor robots wouldn’t have an inherent partnership with a human driver. Basically, they start at Stage 4 of the SAE framework on this regard. However indoor robots do have a unique benefit, one other crutch to depend on as a substitute at preliminary ranges of autonomy — the power to switch their setting.
For instance, modifying a constructing’s infrastructure by portray strains on the ground or inserting landmarks on the partitions just isn’t as tough relative to modifying all street infrastructure. Such markers might be very useful aids for automated guided automobile (AGV) navigation.
Typically, indoor robots immediately undergo an set up course of earlier than being put into operation. Along with modifying constructing infrastructure, mapping, labeling, and different required setup might be part of this course of. This could typically be cost-, time-, and labor-intensive.
The extra superior the navigation expertise of the robotic although, the easier the set up course of tends to be. And decrease set up complexity results in decrease value and friction for adoption.
Set up complexity is thus an vital issue to think about whereas defining the degrees of autonomous navigation for indoor robots.
Social navigation
One other main distinction between self-driving vehicles and indoor autonomous robots is in fact the distinction in environments. Except for factory-like environments, most indoor environments are very unstructured. There aren’t any lanes or indicators, no devoted crosswalks for folks, and no effectively outlined guidelines of the street.
As an alternative, indoor environments are extremely social areas. Robots should co-navigate with all different brokers, human and robotic, which can be additionally utilizing the area. Nicely-defined guidelines of the street are changed by a loosely outlined set of social guidelines that change based mostly on nation, setting, scenario and plenty of different elements. As an illustration, do robots, folks, or different autos cross on the left or the fitting?
Efficiently navigating in these extremely unstructured and social environments requires expertise and behaviors which can be often positioned beneath the label “social navigation.” At a excessive stage, social navigation is a set of behaviors that permits a robotic to navigate in human-populated environments in a approach that preserves and even enhances the expertise of the people round it.
Whereas practical navigation focuses on security and effectivity, leading to robots that may full a job however typically want people to adapt to them, social navigation focuses on the standard of human expertise and permits robots to adapt to people. This will not be essential for managed, human-sparse environments like factories and warehouses however turns into more and more vital for unstructured, human-populated environments.
Operational area helps outline autonomous navigation
A robotic’s operational area is the sorts of environments it may be profitable in. Not all indoor environments are the identical. Completely different environments have totally different wants and may require totally different ranges of navigation sophistication.
As an illustration, warehouses and factories permit for robots with easier, security targeted navigation to achieve success. Then again, environments like inns or eating places are unstructured, unpredictable and require larger ranges of navigation ability, notably social navigation. Much more difficult are extremely crowded environments or delicate environments like hospitals and elder care houses.
Not each indoor setting requires a robotic of the best social navigation stage, however inserting a robotic with low social navigation ability in environments like hospitals can lead to poor efficiency. So it is very important outline the operational area of a robotic.
Multi-floor autonomous navigation
Self-driving vehicles want solely fear about single-level roads. However a lot of buildings on the planet are multi-floor, and robots want to have the ability to traverse these flooring to be efficient. Overcoming this problem of vertical navigation can lead to an enormous improve in a robotic’s operational area and is a vital issue to think about when defining a robotic’s stage.
So set up complexity, social navigation, and operational area are the three barometers in opposition to which we will measure the extent of autonomous navigation for indoor robots.
Multi-floor navigation, whereas vastly vital, is considerably orthogonal to 2D navigation ability and robots of each navigation stage may probably entry it. So we create a stage modifier for this functionality that might be added to any stage.
With that, let’s dive into defining ranges of indoor robotic navigation.
Ranges of autonomous navigation for indoor robots
Stage 0
These are robots that don’t have any autonomous navigation capabilities and rely fully on people to function them. Robots that fall into this class are telepresence robots and distant managed robots like remote-controlled vehicles.
Stage 1
Robots which have a minimal sensor suite and might solely navigate on paths which can be predefined utilizing bodily mechanisms like wires buried within the flooring, magnetic tape or paint. These Stage 1 robots don’t have any potential to go away these predefined paths.
Such AGVs don’t have any idea of location, utilizing solely the space traveled alongside the trail to make choices. They will usually detect obstacles and decelerate or cease for them, however they don’t have the power to keep away from obstacles.

A Mouse AGC 3A10-20T automated guided cart. Supply: Toyota
Stage 1 robots want intensive adjustments to a constructing’s infrastructure throughout set up resulting in important value. They’ve virtually no social navigation functionality, and so their operational area is especially extremely structured and managed manufacturing and logistics environments.

Stage 1 traits. Supply: Relay Robotics
Stage 2
Robots working at Stage 2 are AGVs that don’t want bodily path definition however nonetheless depend on paths which can be digitally outlined throughout set up. These cellular robots can localize themselves inside a website utilizing exterior aids corresponding to reflectors, fiducials or beacons which can be positioned in strategic areas on the website. They will use this location to observe the just about outlined paths.
Like Stage 1 robots, these robots additionally can’t go away their digital predefined paths and might solely detect and cease for obstacles however can’t keep away from them.

Demonstration of an AGV triangulating utilizing reflectors on partitions. Supply: Cisco-Eagle
Though the infrastructure adjustments required are usually not as intrusive as Stage 1, due to the necessity for set up of exterior localization sources, these robots have reasonable complexity of set up. The fastened paths imply that they’ve low social navigation ability and are nonetheless finest utilized in comparatively structured environments with little to no interplay with people.

Stage 2 autonomous navigation traits. Supply: Relay Robotics
Stage 3
Robots working at Stage 3 rely fully on onboard sensors for navigation. They use lidars and/or cameras to kind a map of their setting and localize themselves inside it. Utilizing this map, they’ll plan their very own paths by means of the positioning. They will additionally dynamically change their path in the event that they detect obstacles on it. To allow them to not solely detect obstacles, however may also keep away from them.

A 3D lidar point-cloud visualization. Supply: Jose Guivant, “Autonomous Navigation utilizing a Actual-Time 3D Level Cloud“
This independence and adaptability of Stage 3 robots leads to reasonable social navigation expertise and considerably diminished set up complexity since no infrastructure adjustments are required.
Stage 3 robots can be utilized in unstructured environments the place they’ll navigate alongside people. They signify a major improve in intelligence, and programs of this stage and better are known as autonomous cellular robots (AMRs). Most fashionable service robots belong to this class.
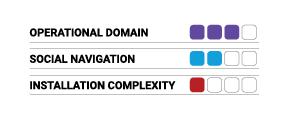
Stage 3 autonomous navigation traits. Supply: Relay Robotics
Stage 4
Though robots of Stage 3 cross the edge of navigating in unstructured environments alongside people, they nonetheless navigate with reasonable social navigation ability. They don’t have the superior social navigation expertise wanted to adapt to all human interplay situations with sophistication. This generally requires the people it interacts with to compensate for its behavioral limitations.
In distinction, Stage 4 robots are AMRs with social navigation expertise advanced sufficient to be on par with people. They will capably navigate in any indoor setting in any scenario offered there aren’t any bodily limitations.
Because of this their operational area can embody all indoor environments. One other ramification of that is that Stage 4 robots ought to by no means want human intervention to navigate.
This stage has not but been totally achieved, and defining and evaluating every part that’s required for such subtle social navigation is difficult and stays an energetic space of analysis. Right here is an infographic from a current try and seize all of the sides of social navigation:

Supply: Anthony Francis, et al., “Ideas and Tips for Evaluating Social Robotic Navigation Algorithms“
To navigate capably in all indoor environments, robots want to have the ability to optimize inside a posh, ill-defined, and consistently altering algorithm. That is one thing that people deal with effortlessly and infrequently with out aware thought, however that ease belies a number of complexity. Listed below are a couple of challenges that lie on the trail to attaining human-level social navigation –
- Proxemics: Each particular person has an area round them that’s thought-about private area. Invading that area could make them uncomfortable, and robots have to respect that whereas navigating. Nevertheless, the scale and form of this area bubble can range based mostly on tradition, setting, scenario, crowd density, age, gender, and so on. For instance, an individual with a walker may want a larger-than-average area bubble round them for consolation, however this area has to shrink significantly when taking an elevator. Specifying guidelines for each scenario can rapidly change into intractable.
- Shared assets: Using doorways, elevators, and different shared assets in a constructing have their very own implicit algorithm. Navigation patterns that maintain for the remainder of the constructing may not apply right here. As well as, robots have to observe sure social norms whereas utilizing these assets. Opening doorways for others is taken into account well mannered. Ready for folks to exit an elevator earlier than attempting to enter, making area for folks attempting to get off a crowded elevator, and even quickly getting off the elevator fully to create space for folks to exit are frequent courtesies that robots want to watch.
- Speaking intent: Robots want to have the ability to talk their intent whereas co-navigating with different brokers. Not doing so can generally create uncertainty and confusion. People do that with physique language, eye contact, or verbal communication. We depend on this notably after we discover ourselves in impasse conditions like strolling towards one other particular person in a slim hall or when approaching the identical door on the identical time. Robots additionally want to have the ability to resolve conditions like these whereas preserving the protection and luxury of the people they’re interacting with.
All in all, attaining this stage of social navigation is extraordinarily difficult. Whereas some Stage 3 robots might have partially solved a few of these issues, there may be nonetheless fairly a methods to go to achieve true Stage 4 autonomy.
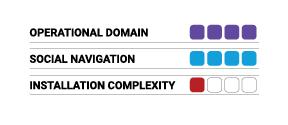
Stage 4 indoor navigation traits. Supply: Relay Robotics
Stage 5
As people, we’re capable of finding our approach even in new, unfamiliar buildings by counting on signage, utilizing semantic information, and by asking for instructions when vital. Robots immediately can’t do that. On the very least, the positioning must be totally mapped throughout set up.

Stage 5 autonomous indoor navigation of a service robotic. Supply: Relay Robotics, generated with Google Gemini
Stage 5 robots are robots that might navigate in all indoor environments on par with human ability, in addition to achieve this in a totally new setting with out detailed prebuilt maps and a manually intensive set up course of. This may take away set up complexity fully, permitting robots to be operational in new environments immediately, lowering friction for adoption, and paving the way in which for robots to change into extra widespread.
This can be a lacking stage within the framework for self-driving vehicles as additionally they undergo an identical course of the place excessive precision 3D maps of an space are created and annotated earlier than a self-driving automobile can function in it. Developments in synthetic intelligence may assist notice Stage 5 functionality.
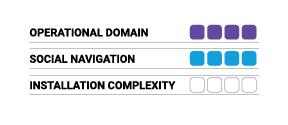
Stage 5 cellular robotic navigation traits. Supply: Relay Robotics
Multi-floor autonomous navigation+
Robots that may both climb stairs or that may name, board, and go away elevators unlock the power to do multi-floor navigation and get the “plus” designation. Additionally, extremely dependable sensors are required to detect and keep away from security hazards like staircases and escalators for any robotic that operates in multi-floor buildings. So a Stage 2 robotic that may efficiently trip elevators can be designated Stage 2+.
Elevator using is the extra frequent of the 2 approaches to this functionality and should require infrastructure adjustments to the elevator system to attain. So this introduces extra set up complexity.
It’s also price noting that in human-populated environments, elevators present robots an extra social navigation problem. It’s because it requires motion in a confined area with many different brokers, tight time constraints for elevator entry and exit, and coping with particular behavioral patterns that people interact in whereas using elevators.
In abstract, robots of Ranges 1 and a couple of rely closely on infrastructure adjustments for navigation and have low social navigation, so they’re finest suited to structured, human-sparse environments.
Robots of Stage 3 are extra clever and self-reliant. They require virtually no infrastructure adjustments throughout set up, however at minimal they require the setting to be mapped and labeled. They possess reasonable social navigation expertise and might function in unstructured, human-populated environments.
Stage 4 represents an development to human-level navigation ability permitting for protected deployment in any indoor setting. Stage 5 robots take this a step additional, navigating with the identical proficiency even in fully new, unfamiliar areas. Any of those robots that may do multi-floor navigation get the extra “+” designation.

Developments throughout ranges. All infographics created by Irina Kim and Jason Hu, Relay Robotics
Autonomous navigation have to be dependable
An important issue for fulfillment that’s not represented on this framework is the general robustness and reliability of the product. It’s simple to underestimate the complexity and unpredictability of real-world environments. Robotic programs usually take a number of years of subject expertise to go from a cool lab demonstration to a sturdy and dependable product that individuals can depend on.
For instance, Relay Robotics affords Stage 3+ robots which have already accomplished over 1.5 million profitable deliveries and collected years of real-world operational expertise. With this mature know-how as a basis, the firm is making strides towards Stage 4+ navigation.
Relay’s give attention to creating subtle social navigation that may deal with even busy and annoying environments like hospital emergency departments has made our AMRs among the many most subtle in the marketplace immediately. For the Relay and the broader trade, the important thing to advancing additional lies in enhancing social navigation capabilities.
Though there may be nonetheless a lot work to do, Relay Robotics is utilizing breakthroughs in AI and deep studying to get there.
Concerning the authors
Sonali Deshpande is senior navigation engineer at Relay Robotics. Previous to that, she was a robotics software program engineer at Mayfield Robotics, a notion programs engineer at Normal Motors, and a robotics engineer at Discovery Robotics.
Deshpande has a grasp’s in robotic programs improvement from Carnegie Mellon College.
Jim Slater is a robotics engineer at Relay Robotics. This text is posted with permission.