

|
Hearken to this text  |
Synthetic muscle tissue are powering a brand new robotic leg developed by researchers at ETH Zurich and the Max Planck Institute for Clever Techniques (MPI-IS). Impressed by residing creatures, the robotic leg jumps throughout completely different terrains in an agile and energy-efficient method.
As in people and animals, an extensor and a flexor muscle make sure that the robotic leg can transfer in each instructions. These electro-hydraulic actuators, which the researchers name HASELs, are connected to the skeleton by tendons.
The actuators are oil-filled plastic baggage, just like these used to make ice cubes. About half of every bag is coated on both facet with a black electrode fabricated from a conductive materials. Thomas Buchner, a doctoral pupil at ETH Zurich, defined that “as quickly as we apply a voltage to the electrodes, they’re attracted to one another resulting from static electrical energy. Equally, after I rub a balloon in opposition to my head, my hair sticks to the balloon because of the similar static electrical energy.” As one will increase the voltage, the electrodes come nearer and push the oil within the bag to at least one facet, making the bag total shorter.
Pairs of those actuators connected to a skeleton lead to the identical paired muscle actions as in residing creatures: as one muscle shortens, its counterpart lengthens. The researchers use a pc code that communicates with high-voltage amplifiers to regulate which actuators contract, and which prolong.
Extra environment friendly than electrical motors
The researchers in contrast the power effectivity of their robotic leg with that of a traditional robotic leg powered by an electrical motor. Amongst different issues, they analyzed how a lot power is unnecessarily transformed into warmth.
“On the infrared picture, it’s straightforward to see that the motorized leg consumes rather more power if, say, it has to carry a bent place,” Buchner mentioned. The temperature within the electro-hydraulic leg, in distinction, stays the identical. It is because the unreal muscle is electrostatic. “It’s like the instance with the balloon and the hair, the place the hair stays caught to the balloon for fairly a very long time,” Buchner added. “Usually, electrical motor pushed robots want warmth administration which requires further warmth sinks or followers for diffusing the warmth to the air. Our system doesn’t require them,” mentioned Toshihiko Fukushima, a doctoral pupil at ETH Zurich.

{kind=link}
Robotic leg has agile motion over uneven terrain
The robotic leg’s capacity to leap relies on its capacity to raise its personal weight explosively. The researchers additionally confirmed that the robotic leg has a excessive diploma of adaptability, which is especially necessary for tender robotics. Provided that the musculoskeletal system has ample elasticity can it adapt flexibly to the terrain in query.
“It’s no completely different with residing creatures. If we are able to’t bend our knees, for instance, strolling on an uneven floor turns into rather more troublesome,” mentioned Robert Katzschmann, who based and runs the Comfortable Robotics Lab at ETH Zurich. “Simply consider taking a step down from the pavement onto the street.”
In distinction to electrical motors requiring sensors to consistently inform what angle the robotic leg is at, the unreal muscle adapts to appropriate place via the interplay with the setting. That is pushed simply by two enter indicators: one to bend the joint and one to increase it.
“Adapting to the terrain is a key facet. When an individual lands after leaping into the air, they don’t should suppose prematurely about whether or not they need to bend their knees at a 90-degree or a 70-degree angle,” Fukushima. The identical precept applies to the robotic leg’s musculoskeletal system: upon touchdown, the leg joint adaptively strikes into an appropriate angle relying on whether or not the floor is difficult or tender.
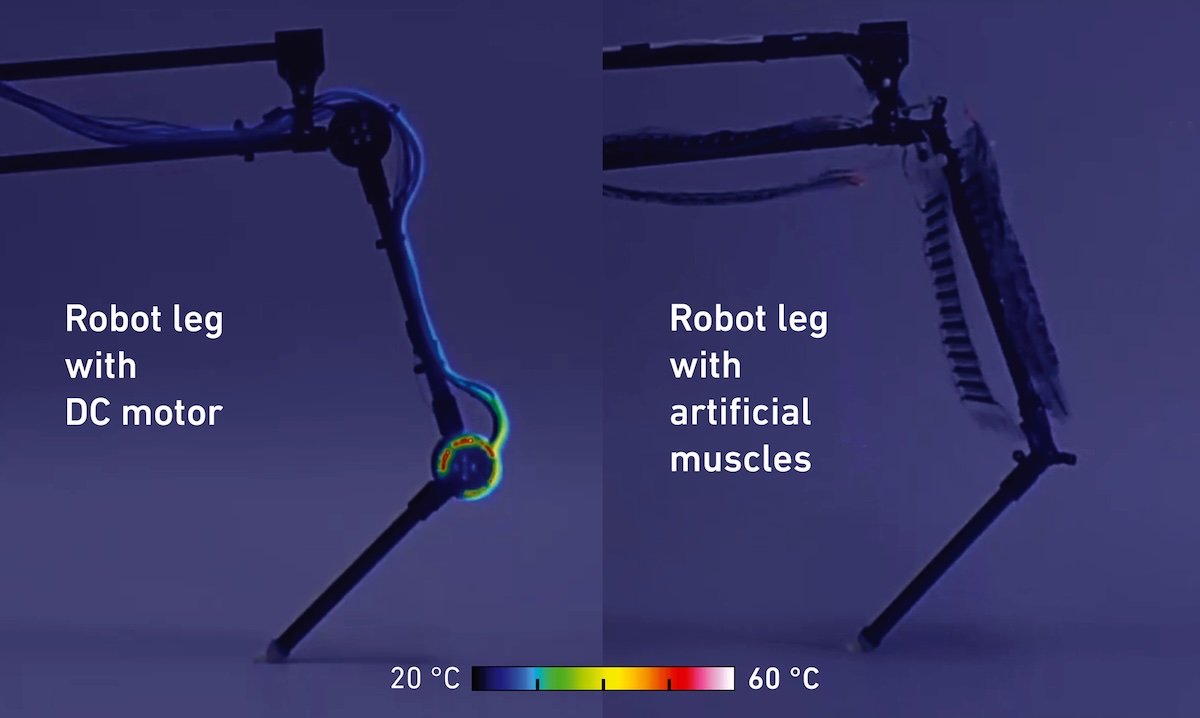
When robotic legs have to carry a sure place for a very long time, numerous present flows via the DC motor that drives them (left). Over time, power is misplaced within the type of warmth. In distinction, the unreal muscle tissue (proper), which work on the precept of electrostatics and are environment friendly, stay chilly, as a result of no present flows via them beneath a relentless load. | Credit score: ETH Zurich and MPI-IS
Rising know-how opens up new potentialities
The analysis area of electro-hydraulic actuators remains to be younger, having emerged solely round six years in the past. “The sphere of robotics is making fast progress with superior controls and machine studying; in distinction, there was a lot much less progress with robotic {hardware}, which is equally necessary.”
Katzschmann added that electro-hydraulic actuators are unlikely for use in heavy equipment on building websites, however they do supply particular benefits over commonplace electrical motors. That is notably evident in functions akin to grippers, the place the actions should be extremely personalized relying on whether or not the article being gripped is, for instance, a ball, an egg or a tomato.
Katzschmann does have one reservation: “In comparison with strolling robots with electrical motors, our system remains to be restricted. The leg is presently connected to a rod, jumps in circles and might’t but transfer freely.”
Future work ought to overcome these limitations, opening the door to growing actual strolling robots with synthetic muscle tissue. He additional elaborates: “If we mix the robotic leg in a quadruped robotic or a humanoid robotic with two legs, possibly in the future, when it’s battery-powered, we are able to deploy it as a rescue robotic.”
Editor’s Word: This text was republished from ETH Zurich.