

|
Take heed to this text  |
A whitepaper explains how you can cut back robotic jitter with software program for larger industrial productiveness. Supply: BlackBerry QNX
Robots want to exactly synchronize for manufacturing purposes reminiscent of meeting, welding, and supplies dealing with. BlackBerry QNX lately launched a whitepaper on “Optimizing Robotic Precision: Unleashing Actual-Time Efficiency with Superior Foundational Software program Options.”
The doc offers steerage to producers on decreasing jitter in high-speed robotic movement. In any other case, it might probably result in misaligned elements, faulty merchandise, and a lower in throughput and effectivity, stated the firm.
Based in 1980, QNX provides business working programs, hypervisors, improvement instruments, and help and companies for essential embedded programs. Acquired by BlackBerry in 2010, the Ottawa, Canada-based unit serves industries together with aerospace and protection, automotive, heavy equipment, industrial controls, medical, and robotics.

{kind=link}
BlackBerry QNX explains goal of whitepaper
Louay Abdelkader, senior product supervisor at QNX, replied to the next questions concerning the whitepaper from The Robotic Report:
Who’s the target market for this whitepaper?
Abdelkader: Our QNX whitepaper is to advise and inform these accountable for constructing the software program that goes into automated guided autos (AGVs), autonomous cellular robots (AMRs), robotic movement controllers. [They’re also responsible for] train pendants for robotic management, information assortment and processing, mapping, picture evaluation, path planning, impediment avoidance and autonomy.
For instance, it’s related to software program engineers, builders and leaders, product/program managers, and different technical and non-technical audiences.
What are the traditional approaches for mitigating jitter and latency in robotics, and the way do they fall brief?
Abdelkader: Because the wants for absolutely and even partially autonomous programs improve, the software program stack turns into the centerpiece of those programs, and as such, they turn out to be extra feature-rich and complicated. As a result of these programs are security-critical and require very dependable and deterministic habits, “onerous” real-time necessities turn out to be prevalent.
The constraints of general-purpose working programs like Linux turn out to be extra obvious because of its lack of security certifications and onerous real-time habits.
There are a number of the explanation why the change from general-purpose OS that comes with “gentle” real-time habits to onerous real-time OS (RTOS) is sensible. These embrace:
- Determinism and timing ensures – Arduous RTOS present strict timing ensures on response instances and execution deadlines.
- Complexity administration – As software program in robots turns into extra advanced, guaranteeing that your OS can deal with mixed-criticality duties is crucial. With Arduous RTOS, there are options and capabilities that permit designers to make use of mixed-critical software program in the identical stack and guaranteeing that the appropriate separation is supplied to keep away from cross-contamination in case of faults or security/security-related occasions that would happen throughout the deployment of the system.
- Security – Arduous RTOS include security and safety features baked in, as a result of they’re utilized in security and mission-critical programs. And a few onerous RTOS, like those QNX offers, include not solely the security options and capabilities, but in addition the security certifications wanted for particular environments together with industrial automation.
- Fault tolerance and reliability – In safety-critical purposes, reminiscent of collaborative robotic purposes and surgical robots, fault tolerance and reliability are paramount. Arduous RTOS are sometimes designed to be very sturdy with excessive imply time between failures, in addition to mechanisms to deal with faults and guarantee continued operation even within the occasion of {hardware} failures or sudden occasions. It’s significantly efficient with a microkernel architectural design the place the kernel and OS companies are separated. This ensures that if an OS service fails, it doesn’t contaminate the kernel and trigger it to be affected or crash, which might carry the system down.
What are some examples of real-time working programs for the “gentle,” “agency,” and “onerous” approaches?
Abdelkader: Within the onerous actual time habits, strict time constraints with assured response instances are anticipated. Lacking a deadline is just not an possibility, as the implications are nothing wanting catastrophic, particularly in extremely safety-critical purposes.
Think about an AMR navigating a high traffic warehouse, for instance. Any delay in its potential to answer obstacles and alter path might result in collisions, probably inflicting harm to items and posing a security threat to personnel.
Gentle real-time behaviors introduce a measure of flexibility the place a system’s operations degrade if it can’t meet particular timing necessities. Whereas these programs goal to fulfill deadlines, they’ll often tolerate minor deviations with out disastrous outcomes.
In an industrial setting, imaginative and prescient programs for inspection play a job right here. These programs guarantee the standard and accuracy of manufactured merchandise, the place minor delays in inspection might have an effect on manufacturing effectivity however not end in extreme penalties.
The agency real-time behaviors are akin to gentle real-time however with a slight distinction. Knowledge arriving after the deadline is commonly deemed invalid. A main instance in robotics is automated 3D printing programs.
In additive manufacturing, if a layer isn’t deposited exactly on time, it may end up in defects within the last product. Whereas minor deviations may not be catastrophic, they may result in the rejection of a printed half, which may hurt manufacturing effectivity and waste supplies.
We’ve heard that synthetic intelligence can get away from deterministic and inflexible approaches to robotic reactions. Is that true but?
Abdelkader: In robotic programs, low latency and jitter are a vital part for each AI and non-AI purposes. In purposes for robots, real-time management will proceed to require low latency (minimal delay in processing) and low jitter (consistency in timing) to make sure protected and deterministic operation.
Determinism ensures that responses to sensor inputs or environmental modifications occur predictably and inside a specified timeframe. The place AI fashions are deployed on the sting, on gadgets with restricted computation sources, deterministic processing also can assist optimize useful resource utilization and guarantee well timed responses with out unpredictable delays.
RTOS guarantees to enhance robotic reliability
How would possibly QNX enhance reliability and security? Would a number of programs be wanted whereas a part is restarted?
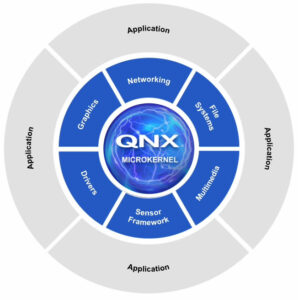
BlackBerry has designed its QNX microkernel for optimization.
Abdelkader: The QNX RTOS is a tough real-time OS constructed with the microkernel structure, famend for its inherent safety, security, and reliability. This structure isolates the kernel, which is a very powerful part of the OS, in its personal reminiscence area and operates the system companies in their very own reminiscence area outdoors the kernel, which offers extra isolation and security boundaries inside the OS.
By decreasing complexity and potential failure factors, QNX facilitates thorough verification via rigorous testing, together with fault injection testing and formal strategies. Faults inside particular person elements are contained, enabling dynamic restarts with out system-wide influence or shutdowns.
In safety-critical embedded programs, the place the maxim “No security with out safety” holds true, the microkernel’s small footprint enhances safety practices and restricts privileged entry. Furthermore, its modular design permits for personalization tailor-made to particular utility necessities, making QNX a perfect selection for robotics programs prioritizing sturdy security and reliability.
Does this RTOS require extra energy or sensing? Are there minimal necessities? How ruggedized does it must be?
Abdelkader: The QNX RTOS are present in microprocessors with reminiscence administration items working on both an Intel x86 or ARMv8 or ARMv9 processors. When comparting the scale of QNX to Linux, the variety of software program strains of code is considerably smaller within the kernel.
Consequently, it sometimes requires much less reminiscence and processing energy to function and convey up the kernel effectively with the added advantages of enhancing efficiency the place real-time purposes require predictability and constant habits.
With its smaller kernel codebase, it additionally signifies that there are fewer – and smaller – potential factors of vulnerability. This helps improve the robustness and reliability of the system, for the reason that kernel is a very powerful part of the OS.
Time-tested in quite a few purposes around the globe, you’ll sometimes see QNX deployed in purposes from slower-paced environments like nuclear energy crops or an ocean buoy, to faster-paced environments like industrial robots and automotive.
QNX can combine with different programs
Does the QNX structure depend on any connectivity to the cloud, fleet managers, or different robots? Can or not it’s used with them?
Abdelkader: The QNX structure itself is primarily designed for embedded programs and real-time purposes the place reliability, security, and safety are a precedence. It operates independently of cloud connectivity or fleet administration programs.
Though QNX itself doesn’t present built-in cloud-connectivity options, it may be built-in with cloud companies, fleet administration programs or extra software program layers. Builders can implement cloud connectivity with middleware reminiscent of ROS or purposes that help communication protocols like MQTT or OPC UA.
This course of permits QNX-based gadgets to work together with cloud companies for information storage, distant monitoring, digital twinning, and so forth.
QNX will also be built-in into fleet administration programs via software program purposes that deal with duties reminiscent of machine monitoring, telemetry information assortment, and fleet optimization. This integration entails creating software program elements that talk with QNX gadgets.
Because it pertains to inter-robot communication, robots utilizing QNX can use customary communication protocols like TCP/IP to collaborate, share information, and coordinate duties successfully.
What do robotics builders and suppliers must learn about integrating such programs of their merchandise? How a lot work is required on their aspect?
Abdelkader: QNX offers POSIX compliant RTOS, which simplifies improvement for these accustomed to POSIX compliant OS like Linux. This computability signifies that builders can use present data and instruments, streamlining the combination course of.
Furthermore, QNX gives each security licensed merchandise just like the QNX OS and QNX hypervisor. The RTOS ensures deterministic habits for safety-critical purposes, whereas the hypervisor permits consolidation of {hardware} onto one SoC via software program – permitting builders to construct security and non-safety purposes on the identical platform.